Я пытаюсь использовать OpenCV в сочетании с дешёвым USB-микроскопом для реального измерения площади образцов, которые мы готовим с помощью прокатки фольги, и которые в настоящее время измеряются с помощью штангенциркуля. Из-за неровных краёв некоторых образцов я хотел бы исследовать возможность использования анализа изображений, вместо того, чтобы делать предположения о том, что они круговые, прямоугольные и так далее. Кроме того, я хотел использовать миллиметровую сетку (на световом боксе, чтобы искать микроотверстия) за объектами, чтобы иметь возможность получить калибровку пиксель<->мм на лету. Это также значительно повышает контрастность, что облегчает установку порогов и избегание проблем с отражениями и т. д.
Это было успешно, но хотя площадь квадратов на сетке определяется точно, когда я изображаю объекты известного размера/площади (например, 1 цент США), я получаю значения, которые на 2-4% выше ожидаемых. Это можно было бы легко компенсировать изменением референсного значения до тех пор, пока калибровочный объект не будет измерен правильно, но я беспокоюсь, что это всего лишь временное решение проблемы, которую я делаю неправильно, возможно, с морфологическими преобразованиями / гауссовым размягчением, искажая края слишком сильно? Монета была проверкой калибровки, но не может находиться в кадре во время обычного использования, именно поэтому я хотел использовать сетку для калибровки с самого начала. Камера установлена вертикально над объектом и по центру, а попытка выполнить калибровку камеры, похоже, добавила больше сферической аберрации, чем улучшила ситуацию.
Это приводит к двум основным вопросам:
- Что я делаю неправильно?
- Возможно ли оценить неопределенность в площадях, рассчитанных через
cv2.contourArea(contour)? Штангенциркули обычно позволяют нам достигать неопределенности менее 0,5% в измерениях площади, но количественная оценка неопределенности здесь была бы важна, хотя я не вижу информации об этом в документации…
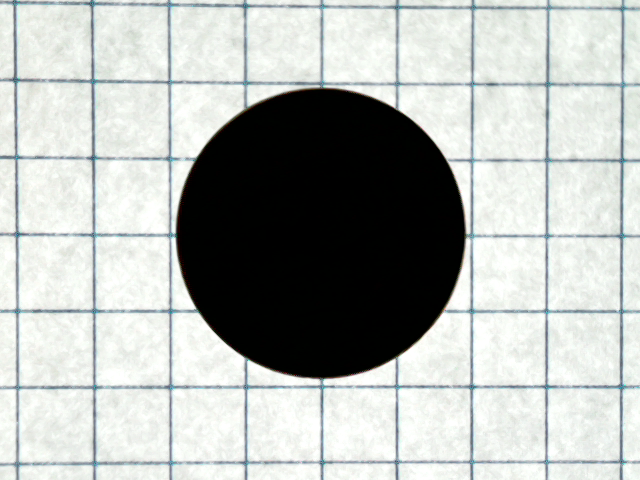
Вот пример входного изображения с обычной монетой в 1 цент США, на бумаге с размером сетки 5 мм:
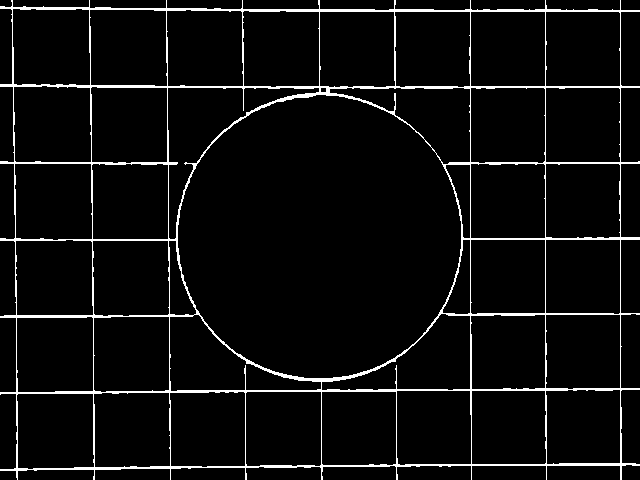
Градация серого:
Код для обнаружения квадратов сетки на заднем плане и возврата среднего значения калибровки пикселей<->мм:
def measureGridSize(img, show_plot=True):
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
grid_area_threshold = 100
known_grid_width = 5 # мм
outerBox = np.zeros(gray.shape, np.uint8)
gray = cv2.GaussianBlur(gray,(3,3),0)
outerBox = cv2.adaptiveThreshold(gray,255,cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY_INV,3,2)
kernel = np.array((
[0, 1, 0],
[1, 1, 1],
[0, 1, 0]), dtype="uint8")
# Разглаживаем края сеток, убираем артефакты бумаги
outerBox = cv2.dilate(outerBox,kernel,iterations = 1)
outerBox = cv2.morphologyEx(outerBox, cv2.MORPH_CLOSE, np.ones((2,2)))
outerBox = cv2.morphologyEx(outerBox, cv2.MORPH_OPEN, np.ones((3,3)))
outerBox = cv2.erode(outerBox,np.ones((3,4),np.uint8),iterations = 1)
# Находим контуры
contours, hierarchy = cv2.findContours(outerBox, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
area_list = []
contour_list = []
for contour in contours:
# находим моменты изображения
M = cv2.moments(contour)
try:
cX = int(M["m10"] / M["m00"])
cY = int(M["m01"] / M["m00"])
except ZeroDivisionError:
cX = 0
cY = 0
# если центр черный, значит контур ограничивает квадрат сетки
if (outerBox[cY,cX] == 0) and (cY > 0) and (cX > 0):
approxCurve = cv2.approxPolyDP(contour, 50, True)
# если площадь прямоугольная
if len(approxCurve)==4:
# получаем размеры сторон
(x,y,w,h) = cv2.boundingRect(contour)
delta = 0.2;
area = area = cv2.contourArea(contour)
cv2.drawContours(img, [contour], -1, (255,0,0), 3) # изображаем все найденные контуры в синем
cv2.drawContours(outerBox, [contour], -1, (255,0,0), 3) # изображаем все найденные контуры в синем
# Проверяем, выглядит ли контур как квадрат в пределах допуска
if (abs((w/h)-1) < delta) and (area > grid_area_threshold) and (abs((w*h/area)-1) < delta) :
if area > 0:
area_list.append(area)
contour_list.append(contour)
for (area,contour) in zip(area_list,contour_list):
cv2.drawContours(img, [contour], -1, (0,255,0), 3) # изображаем квадратные контуры в зеленом
# брать медиану или среднее для масштабирования сетки?
# Убираем крайние случаи, чтобы отбросить шум
area_list.sort()
if len(area_list) < 2:
median = np.mean(area_list)
elif len(area_list) < 3:
median = np.mean(area_list[1:-1])
else:
median = np.mean(area_list[2:-2])
pixels_per_mm = 0
# считаем сторону квадрата, которая равна количеству пикселей на миллиметр
if np.size(median) == 1:
pixels_per_mm = np.sqrt(median) / known_grid_width
# Аннотируем площадь на каждом обнаруженном квадрате сетки для сравнения
for contour in contour_list:
area = cv2.contourArea(contour)
if area > grid_area_threshold:
x, y, w, h = cv2.boundingRect(contour)
cv2.putText(img, '{0:.2f}'.format(area/(pixels_per_mm*pixels_per_mm)), (x, y+20), cv2.FONT_HERSHEY_SIMPLEX, 0.75, (0, 0, 255), 2)
return pixels_per_mm
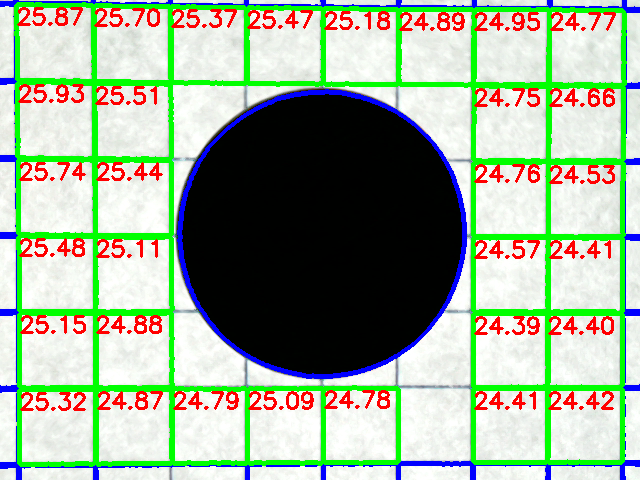
с выводом:
Код, который берет калибровку пикселей на миллиметр и измеряет площадь объектов при установленном пороге:
def measureArea(img, pixels_per_mm):
area_threshold = 100 # Отбрасываем мелкие детали
# Преобразуем в градации серого
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#
# Обнаружение порогов
#
blur = cv2.GaussianBlur(gray, (5, 5), 0)
ret,th1 = cv2.threshold(gray,70,255,cv2.THRESH_BINARY)
contours,hierarchy = cv2.findContours(th1, 1, 2)
for contour in contours:
area = cv2.contourArea(contour)
# Аннотируем площадь объекта на изображении
if area > area_threshold:
x, y, w, h = cv2.boundingRect(contour)
cv2.putText(img, '{0:.2f} см²'.format(area/(pixels_per_mm*pixels_per_mm*100)), (x, y), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
cv2.drawContours(img, [contour], -1, (0,255,0), 1) # изображаем квадратные контуры в зеленом
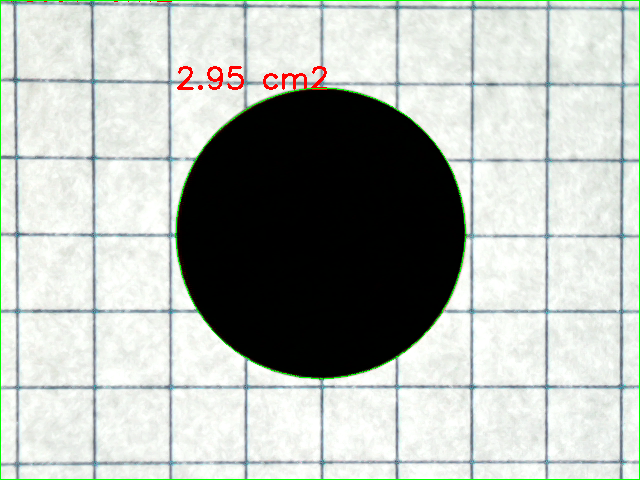
с выводом:
И наконец, код, который просто перебирает поток камеры и вызывает два вышеуказанных метода, и делает скользящее среднее пикселей на миллиметр, чтобы сгладить выходные значения площади (чтобы избежать дрожания значений в реальном времени):
def acquireFromCamera(show_calibration=False):
# Открываем камеру по умолчанию (по умолчанию было 0)
cam = cv2.VideoCapture(0)
pixel_scale_list = []
# Цикл по кадрам входного потока камеры
while True:
# Переключено с ввода камеры на imread для публикации на stackoverflow
#
# ret, frame = cam.read()
frame = cv2.imread('original_image.png')
frame_copy = frame.copy()
pixels_per_mm = measureGridSize(frame)
# Получаем скользящее среднее пиксельного масштаба для сглаживания выходных площадей
if not np.isnan(pixels_per_mm):
pixel_scale_list.append(pixels_per_mm)
avg_pixel_scale = np.convolve(pixel_scale_list, np.ones(len(pixel_scale_list))/len(pixel_scale_list), mode="valid")
print(avg_pixel_scale)
measureArea(frame_copy, avg_pixel_scale[0])
if show_calibration:
cv2.imshow('Обнаружение площади', frame_copy)
# Отображаем захваченный кадр
cv2.imshow('Камера (нажмите q для выхода)', frame)
if cv2.waitKey(1) == ord('q'):
break
# Освобождаем захват и объекты записи
cam.release()
cv2.destroyAllWindows()
acquireFromCamera(True)
Использование known_grid_width = 5 # мм для бумаги с размером сетки 5 мм генерирует точные измерения площадей квадратов сетки (в среднем 24.94398288816283 мм²), но переоценивает ожидаемую площадь монеты в 2.853 см² примерно на 3%. Уменьшение known_grid_width для правильной площади монеты делает площади квадратов сетки около 23.8 мм², что является серьёзной недооценкой, а измерения штангенциркуля сетки бумаги выглядят последовательными с 5 мм. Я не думаю, что это проблема с порогами для measureArea(), а использование среднего против медианы для получения представительного значения пикселей на мм в каждой итерации цикла также кажется довольно не чувствительным. Если это проблема с морфологическими преобразованиями в обнаружении сетки, выбор ядра был ОЧЕНЬ чувствителен к тому, сколько квадратов сетки вообще было обнаружено. Не имея временного решения с использованием площади монеты вместо known_grid_width (и тем самым опровергая всю цель бумаги), как я могу согласовать результаты площадей сетки с монетой?
Буду признателен за любую помощь, которую вы можете предоставить, особенно в оценке неопределенности в соответствиях площади! Спасибо!!
Ответ
Квантификация неопределенности в измерении площади с помощью OpenCV может быть сложной задачей, особенно при работе с изображениями объектов с неправильными краями. Вы правы в том, что использование методов компьютерного зрения может помочь улучшить точность и избежать предположений о геометрии объектов. Давайте рассмотрим, как улучшить текущую систему и как оценить неопределенность в измерениях площади.
1. В чем может быть проблема?
Возможные источники ошибок:
- Калибровка камеры: Неправильная калибровка может вызывать искажения в изображении. Используйте более продвинутые методы, такие как использование шахматной доски для калибровки, что позволит уменьшить сферические аберрации.
- Предобработка изображений: Некоторые методы обработки, такие как размытие Гаусса или морфологические преобразования, могут размывать края объектов, что может привести к переоценке площади. Попробуйте использовать меньшие значения для размытия или другие методы, такие как медианное размытие.
- Парные ошибки: Убедитесь, что формулы для вычисления площади применяются корректно. Например, могут возникнуть проблемы при вычислении момента, если контуры не обработаны должным образом.
2. Оценка неопределенности
Для того чтобы оценить неопределенность при измерении площади с помощью cv2.contourArea, вы можете использовать два основных подхода:
a) Метод статистического анализа
- Измерьте площадь нескольких объектов: Выберите несколько объектов с известной площадью и измерьте их площади при помощи вашего алгоритма.
- Определите стандартное отклонение: Рассчитайте среднее значение и стандартное отклонение этих измерений. Стандартное отклонение даст вам представление о том, насколько варьируются ваши измерения.
- Неопределенность: Неопределенность в измерениях может быть оценена с использованием формулы:
[
U = \frac{S}{\sqrt{n}}
]
где ( S ) — стандартное отклонение, а ( n ) — количество измерений.
b) Метод Монте-Карло
- Семплирование: Создайте несколько случайных "шумных" версий вашего изображения, добавив небольшой случайный шум к пикселям.
- Измерьте площадь: Для каждого сгенерированного изображения измерьте площадь объектов.
- Расчёт неопределенности: Аналогично предыдущему методу, рассчитайте стандартное отклонение для всех измерений.
Код для получения неопределенности
import numpy as np
def calculate_area_uncertainty(contours, n_samples=100):
areas = []
for contour in contours:
area = cv2.contourArea(contour)
areas.append(area)
areas = np.array(areas)
# Стандартное отклонение
std_dev = np.std(areas)
# Неопределенность
uncertainty = std_dev / np.sqrt(len(areas))
return uncertaintyРешение проблемы с калибровкой
Чтобы решить проблему с калибровкой, вы можете ввести калибровочный коэффициент, который будет корректировать значение площади на основе измеренной площади известного объекта (например, например, 1 цента или пенни). Это может выглядеть так:
calibration_factor = known_penny_area / measured_penny_area
# Примените этот коэффициент к измеренной площади
corrected_area = measured_area * calibration_factorЗаключение
- Путем улучшения предобработки изображений и применения тщательной калибровки камеры вы можете уменьшить искажения в измерениях.
- Оценка неопределенности с помощью статистических методов или метода Монте-Карло поможет вам установить уровень доверия к вашим измерениям.
Надеюсь, эти советы и методы помогут вам добиться более точных и надежных результатов в ваших измерениях площади с использованием OpenCV!