Вопрос или проблема
Предположим, у меня есть эксперимент, в котором я отпускаю одну крысу в лабиринт и жду, пока она дойдет до конца. Скажем, я также отслеживаю положение этой крысы в лабиринте в различные моменты времени. Давайте проделаем это $n$ раз. Теперь у меня есть набор данных из $n$ переменно-длинных профилей движения, поскольку некоторые животные заканчивают быстрее, другие дольше и т.д. Существует ли способ проанализировать эти данные, чтобы затем предсказать следующий ход $(x_{t+1}, y_{t+1})$, зная $(x_t, y_t)$? Какие техники я мог бы использовать и как они бы работали? Я думал о LSTM или RNN, но не уверен, какие техники используются для таких проблем.
Да, вы можете использовать LSTM или RNN, но, на мой взгляд, могут быть и другие возможности. Если вы хотите использовать рекуррентную нейронную сеть, вам следует использовать режим обучения с учителем: 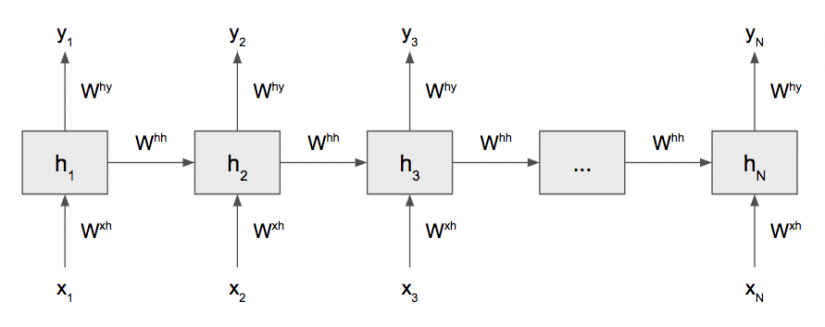
(многие – ко – многим)
Вход x1 – это перемещение крысы в момент времени 1, y1 – перемещение крысы в момент времени 2, x2 – перемещение крысы в момент времени 2, y2 – перемещение крысы в момент времени 3 и так далее…
Но для вашей задачи рекуррентная сеть может быть не лучшим выбором. Я рекомендую вам использовать дерево решений или алгоритм случайного леса, так как возможных исходов для крысы всего 4: направо, налево, вверх, вниз, и у вас есть конечное количество положений, “лабиринт”. Лучшее, что вы можете сделать, это построить алгоритм случайного леса, где признаками могут быть, например, стены вокруг крысы, расстояния от этих стен до неё, расстояние до выхода и количество раз, когда крыса проходила через это состояние, а метки – направо, налево, вверх, вниз.
Помните, что модель машинного обучения работает лучше, чем модель глубокого обучения, если данные несогласованные, и случайный лес – это очень мощный инструмент машинного обучения
.
Ответ или решение
Теория
Рассмотрим задачу, когда у нас есть набор данных о перемещениях крысы в лабиринте, проведенных несколько раз. Эти перемещения представляют собой последовательности переменных длин, так как разные крысы добираются до конца лабиринта за разное время. Нашей целью является предсказание следующего движения крысы в лабиринте, ( (x{t+1}, y{t+1}) ), зная ее текущее положение ( (x_t, y_t) ). Для решения этой задачи можно использовать разные подходы машинного обучения: начиная с рекуррентных нейронных сетей (RNN, LSTM) и заканчивая классическими методами, такими как деревья решений и случайные леса.
Пример
Рассмотрим ситуацию, когда мы используем рекуррентную нейронную сеть, такую как LSTM. LSTM (Long Short-Term Memory) – это тип RNN, который может обрабатывать последовательности данных, учитывая долгосрочные зависимости. Он полезен, когда важна вся история движения, а не только текущее состояние.
С другой стороны, можно применить такие алгоритмы, как дерево решений или случайный лес. Эти модели изучают закономерности на основе признаков, таких как текущее положение, количество пройденных состояний и расстояние до стен или выхода. Например, модель может изучать, куда крыса перемещается чаще всего, находясь около определенных препятствий.
Применение
-
Рекуррентные нейронные сети:
- Архитектура: Конструируем сеть типа "многие ко многим", где входные данные (x_t) соответствуют состояниям крысы в момент времени (t), а выходные данные (y_t) – это прогнозируемые состояния (t+1).
- Преимущество: Способность учитывать всю историю маршрута крысы.
- Ограничения: Возможно, требует больше данных и вычислительных ресурсов для обучения.
-
Алгоритмы, основанные на деревьях:
- Используя признаки, такие как стены вокруг крысы, расстояние до ближайшего выхода или угла и количество прохождений через текущее состояние, можно построить более интерпретируемую модель.
- Преимущество: Модели на основе деревьев обычно проще в реализации и требуют меньше данных для эффективной работы.
- Ограничения: Меньше возможностей для обработки сложных временных зависимостей по сравнению с LSTM.
Таким образом, выбор метода должен основываться на характеристиках данных и ресурспособностях. Если собранные данные позволяют учитывать пространственные и временные зависимости, LSTM может дать более точный результат. В противном случае, дерево решений или случайный лес обеспечат более быстрое и понятное решение.